
June 4, 2019
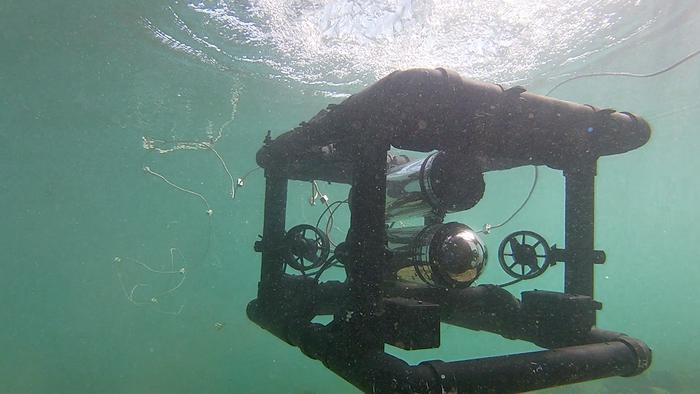
Second ever dive with ROV. Very happy with the initial results. I definitely need to improve the fine control of the thruster motors as full power comes on a little too easily. Also ran into foreseen problems with the tether not being neutrally buoyant. It sank to the bottom where it would get caught on rocks and pull the back end of the ROV down. It eventually developed a tear in the outer sheathing. The next tether will have small blocks of high-density foam along its length to help avoid this issue. Of course a long term solution will involve a purpose-built (and expensive) neutrally buoyant and much more flexible tether. Saw a small school of fish on this one also! The temperature readings seem accurate, however after a short amount of time the LCD display starts displaying some erratic characters and this is a bug that needs to be looked into.
(Note: Video footage is from an externally mounted Gopro and I am actually controlling the ROV with an analog camera inside the housing. I don't have video storage capability at the moment.)
June 11, 2019
First dive with my attempt at a neutrally-buoyant tether and it seemed to go well. Small blocks of high-density foam from Blue Robotics were used. I determined the total amount needed by submerging the roll of cable in a sink filled with water then divided the foam into equal squares (as much as possible) to be spread out at set intervals along the cable. A hole was drilled in each block and marine epoxy was used to keep them in place. Also, on the previous dive, my joystick controls were unintentionally inverted and this was fixed by switching around the connections on the joystick potentiometers.
July 1, 2019
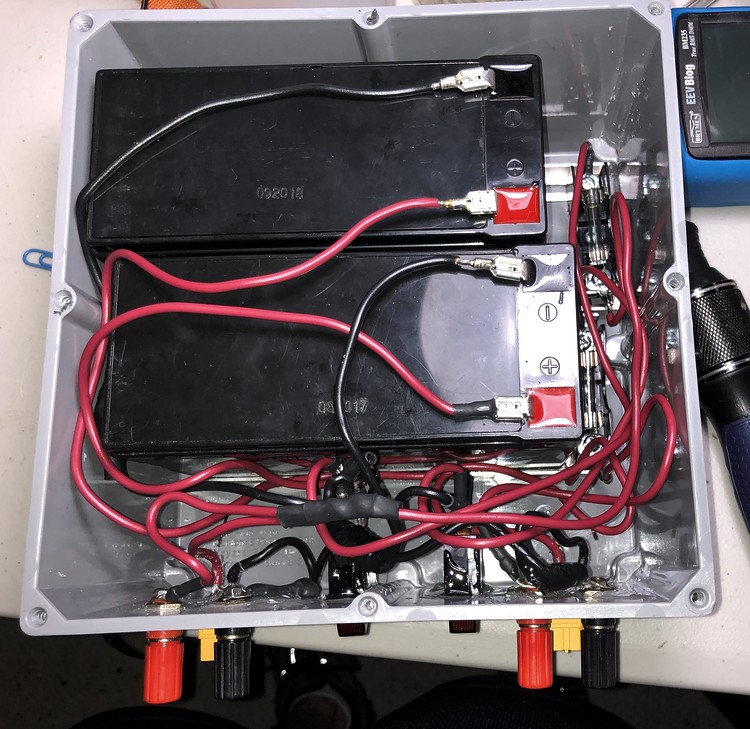
Another test dive today. This was mostly for the purpose of capturing "non-onboard" video footage of the ROV maneuvering around. One thruster stopped working towards the end of the dive and I suspect an electrical problem (non-software issue). Hope to sort it out in the next few days. This was also the first day using my fabricated battery box which supplies power to the ROV control box.
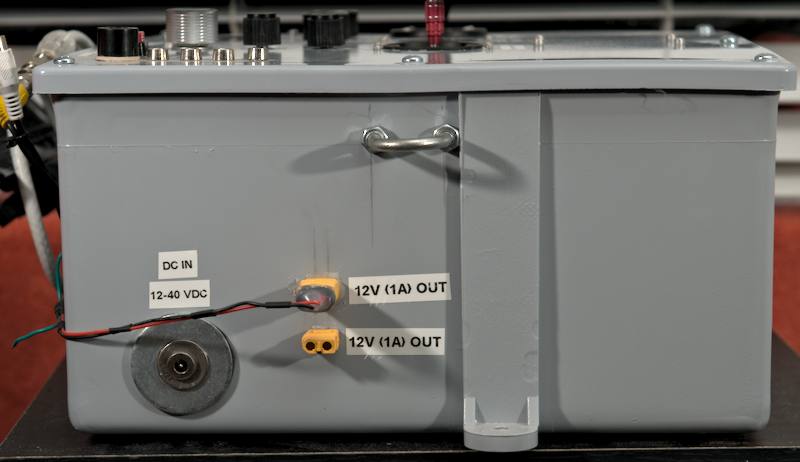
Outside of battery box:

Inside of battery box:
August 24, 2019

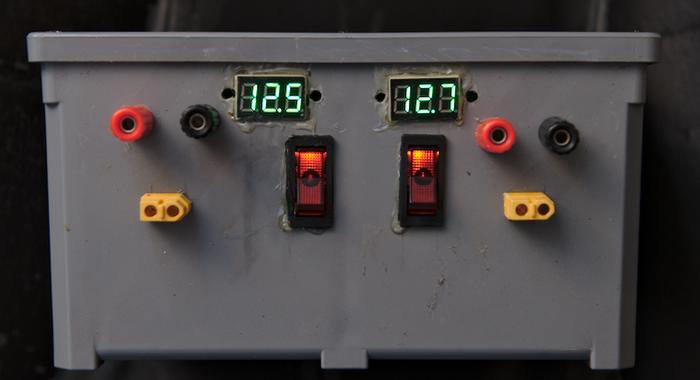
Today was the first dive with my newly implemented adjustable gain control. A rotary switch on the control box allows gain settings of 25, 50, 75 and 100 percent. The current gain setting is displayed on the LCD screen. Control of the ROV is now much more fine "tunable" and allows for better maneuvering when small movements are desired. Updated source code for the control box can be found in the Gitlab Control Box Repository. I also added LED voltage displays to both outputs of the battery box used to supply power to the controller. The failed thruster from last dive was replaced. Everything went well with no failures this time aside from a slight negative buoyancy that needs to be addressed.
Voltage display for control box power supply:
Gain selector switch and LCD output:



May 30, 2020
First breadboard prototyping with the robotic gripper arm. This test platform simulates the ROV main circuit board receiving signals from the surface controller and sending those signals the robotic arm controller via i2c.
June 28, 2020
Added limit switches to the lead screw of the robotic gripper arm. Two hall effect sensors are mounted to the aluminum channel that houses the lead screw assembly. A magnet is mounted to the shaft that is driven by the screw. This prevents the motor from causing damage by attempting to drive the lead-screw outside of it's intended range of motion.
November, 2020
New surface controller box has been constructed. The larger size allows for two extra joysticks to be used for the robotic gripper arm. Additionally, the output connections for the LCD video screen are now regulated 12V. An entirely new PCB was designed for both the control box as well as the gripper arm mounted to the ROV. Documentation will follow in the coming months:


March 20, 2021
Constructed a vacuum chamber for epoxy potting the windings of the brushless motor found on the gripper arm. Photos below show the setup and final result.



January 06, 2022
A momentary push button switch has been added to the control box which allows the user to reset the ROV remotely (should the need arise). Upon receiving the reset command (via UART), the ROV flashes the LEDs several times before performing a software reset. After sending the reset command, the control box MCU displays a message on the LCD screen before automatically resetting itself as well.

The video below shows the system reset in action: