The control box for our ROV uses a 20 character by 4 line (20x4) Hitachi 44780 LCD display. At the time of writing this the LCD screen displays a notice on startup letting the user know that the system is in the initialization phase.

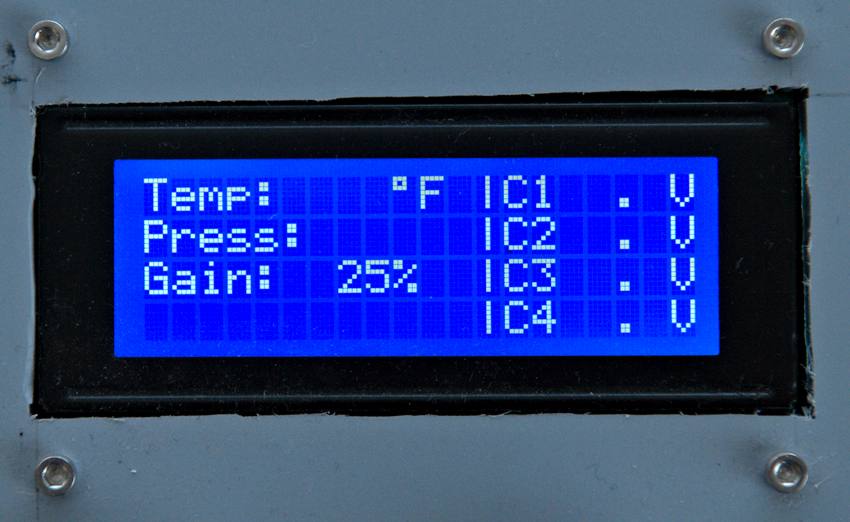
Once everything has been initialized, the LCD display is cleared of this messages and the temperature, pressure, gain and battery headers are displayed. The position of the gain selector knob is determined upon startup and this information is displayed immediately.
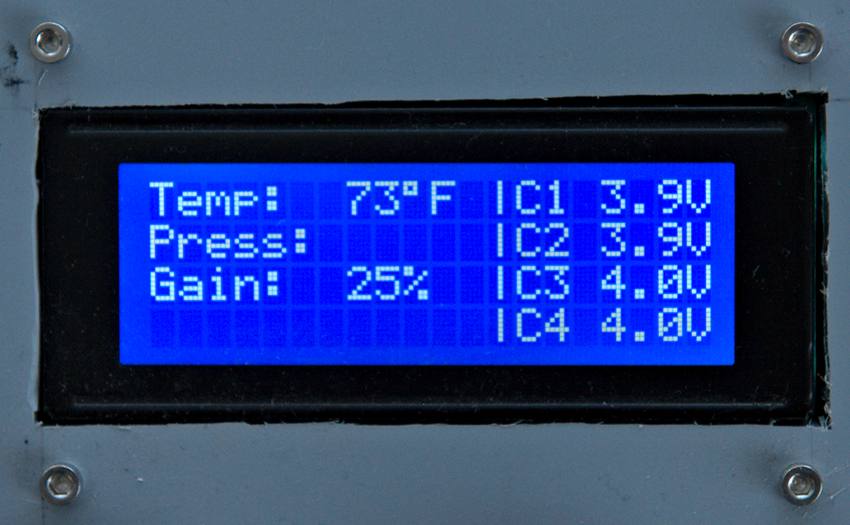
After the intervals for battery and temperature readings have elapsed, the information is displayed on the LCD once the data is retrieved from the ROV.
All subroutines that deal with printing images to the 20x4 LCD can be found in the LCD.asm file. Basic communication and character display between PIC MCUs and the Hitachi 44780 is covered in the LCD interfacing tutorial.
Next we will take a look at the circuit and code on board the ROV itself